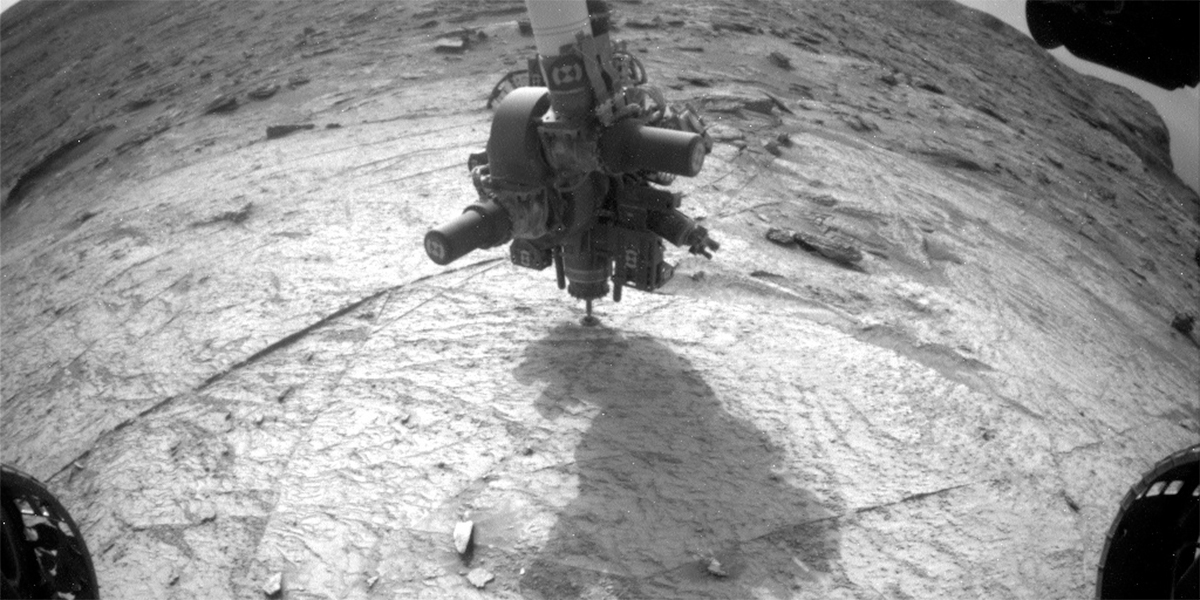
Cette image a été prise par la caméra d’évitement de danger avant (Front Hazcam) à bord du vaisseau spatial Curiosity de la NASA au Sol 3512 (2022-06-23 19:00:25 UTC). Crédit : NASA/JPL-Caltech. Téléchargement d’images ›
L’équipe MSL est très heureuse aujourd’hui, car notre première tentative d’entraînement depuis novembre dernier C’était réussi ! Ce Hazcam . Trentenaire image Montre le foret extrait du nouveau trou de forage, qui est entouré de queues de forage comme prévu. C’est l’une des nombreuses fois dans la mission MSL que les fosses ont dû être repensées pour surmonter l’anomalie, a de nouveau nécessité une planification et des tests minutieux avec des appareils de forage presque identiques au JPL. Félicitations à l’équipe de résolution des problèmes d’anomalies et merci pour tout le bon travail qui a permis de creuser à nouveau ! Le forage est nécessaire pour obtenir des échantillons de roche et les livrer aux instruments de laboratoire SAM et CheMin à l’intérieur du rover, c’est donc un jour de fête pour l’équipe scientifique de MSL.
Mais avant que tout échantillon ne soit livré à CheMin ou SAM, nous devrions voir les résultats de la caractérisation des portions d’échantillons de forage qui était prévue mercredi dernier. Ces résultats ne seront pas retransmis sur Terre à temps pour planifier les Sols 3514 à 3516, donc le plan de ce week-end comprend plusieurs observations de télédétection et environnementales, y compris plus d’images Mastcam et Navcam du terrain à l’est et à l’ouest du rover à différents moments de Aujourd’hui, un meilleur échantillonnage de la géométrie observée est nécessaire pour contraindre le comportement photosynthétique des matériaux de surface. Ces observations optiques sont utiles pour déterminer les propriétés de diffusion et la rugosité des roches, des sols et des poussières à la surface. ChemCam sera également occupé, avec des points LIBS traçant chaque jour martien, pour les cibles « Magna Brava » (roche mère locale), « Rio Uraricoera » (veine) et « Wiapri » (roche sombre). Mastcam documentera les emplacements LIBS sur chacune de ces cibles, et le matin du SOL 3514, il obtiendra une mosaïque stéréo 12×2 pour étendre la couverture des structures sédimentaires à Marbura Hill et une observation multispectrale des sols perturbés à ‘Kamana’. Cet après-midi-là, Navcam et Mastcam examineront les propriétés de la poussière dans l’atmosphère et Mastcam disposera de deux autres mosaïques holographiques, « Amacuro » et « Deepdale ».
Au Sol 3515, Mastcam et Navcam mesureront la quantité de poussière dans l’atmosphère et Navcam recherchera des diables de poussière et de nuages à plus grande échelle que d’habitude, avec plus de temps et d’énergie disponibles ce week-end. Navcam recherchera les nuages avant l’aube et Mastcam mesurera la quantité de poussière au-dessus du rover plus tard le lendemain matin. Navcam recherchera à nouveau des nuages et des diables de poussière plus tard ce Sol. Le rover se réveillera à nouveau avant l’aube sur Sol 3517 pour permettre à Navcam de rechercher des nuages. Plus tard dans la matinée, Mastcam et Navcam mesureront la teneur en poussière dans l’atmosphère avant que Navcam ne recherche à nouveau les nuages. REMS et DAN surveilleront également les conditions environnementales pendant le plan du week-end. MSL sera donc occupé en attendant des nouvelles de la configuration de la pièce d’échantillon !